The ROCK Cloud uses a very sophisticated and accurate way of determining the area of your point cloud. On our servers we load all of the points from every file into a 2d plane and draw a border around the dataset. If you have non-contiguous point clouds (think Islands), then multiple borders around the contiguous islands of points will be drawn. Once all of the borders are created, then the area is added up and reported out.
Why is my KML or Flight Plan so much less area?
Simply put, the angle of your LiDAR sensor means you collect a lot more data than directly under your flight plan.
One way of verifying this yourself is to:
1. Go to the LiDAR view and use the area tool to draw a rough boundary around your entire dataset. (As mentioned above, the boundary we calculate will be much more precise than your rough boundary, but this will get you close)
2. Upload your KML to your project data or just navigate to the map view and compare visually.
What you will see is something like the following:
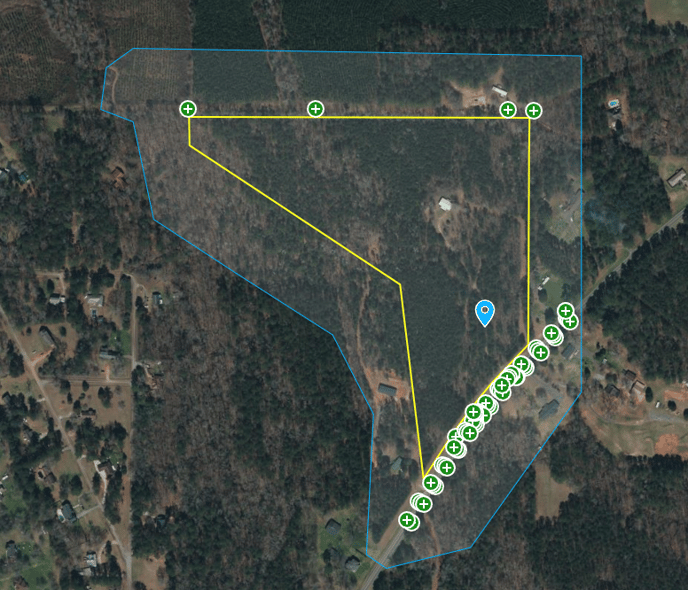
Where the yellow was the expected data collection but the blue line indicates the actual area collected.